










































Understanding the Field-Centric Drive in FTC
Quick Summary: Field-centric drive is a control system commonly used in FTC mecanum drivetrains that keeps robot movement aligned to the field instead of the robot’s orientation. Unlike robot-centric drive, drivers do not need to mentally adjust controls when the robot rotates. This article explains what field-centric drive is, how it works, the math behind it, and common considerations teams should understand before implementing it.
What Is Field-Centric Drive?
In traditional robot-centric teleop control, robot movement is based on the robot’s orientation. The robot has a designated “front” and “back,” and the controls rotate with the robot.
For example, if the robot turns 90 degrees to the right, pushing the joystick forward causes the robot to move toward the right side of the field because the front of the robot is now facing that direction.
Field-centric drive changes this behavior by making movement relative to the field rather than the robot’s orientation. No matter which direction the robot faces, controls stay aligned to the driver’s perspective from the driver station.
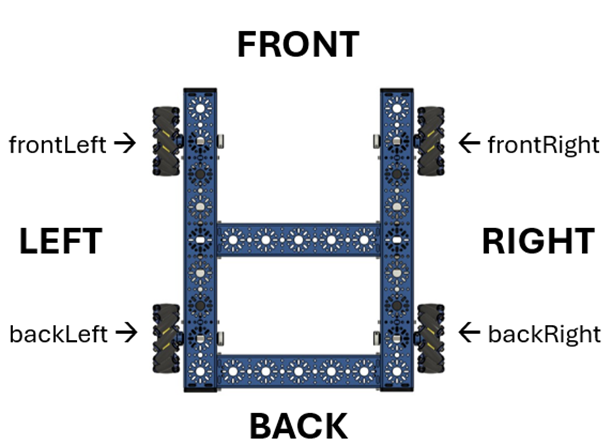
Robot Orientation Diagram for Robot-Centric
Robot-Centric vs. Field-Centric Drive
Let's take a closer look at the robot-centric drive and the field-centric drive so you can understand how and when each could work best for your team.
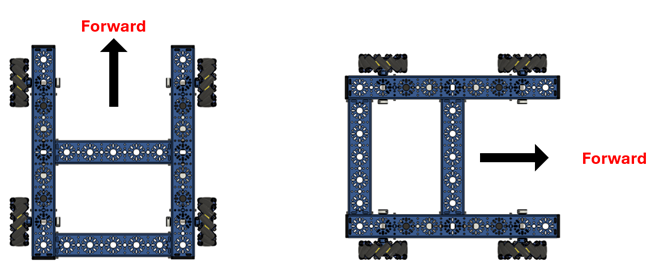
Robot-Centric Drive
With robot-centric drive:
- Pushing the joystick forward moves the robot in the direction the robot is facing
- Controls rotate with the robot
- Drivers must constantly account for robot orientation during movement
Robot-Centric Drive Perspective
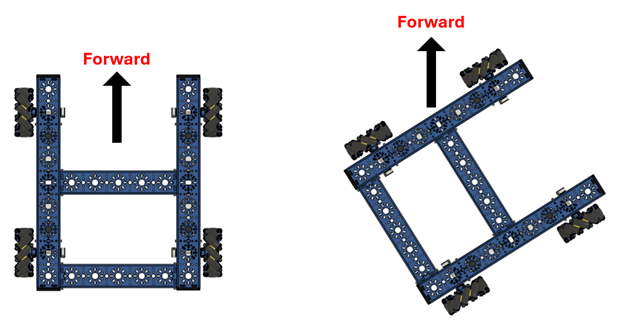
Field-Centric Drive
With a field-centric drive:
- Pushing the joystick forward always moves the robot forward relative to the field
- Controls remain consistent regardless of robot orientation
- Drivers can rotate the robot without mentally remapping controls
Field-Centric Drive Perspective
Why FTC Teams Use Field-Centric Drive
Field-centric drive is commonly used in FTC because it can create a more intuitive driving experience, especially with mecanum drivetrains.
| Benefit | Description |
|---|---|
| Intuitive controls | Forward on the joystick always moves the robot forward relative to the field, regardless of robot rotation. |
| Easier navigation | Helps drivers maintain straighter paths and execute smoother strafing and diagonal movement. |
| Better focus on gameplay | Reduces mental load so drivers can focus on scoring and strategy instead of orientation. |
| Improved omnidirectional movement | Works especially well with mecanum drivetrains for full-direction movement without needing to rotate first. |
| Faster reaction time | Drivers respond more quickly because controls stay consistent under rotation. |
However, preferred drive style still depends on driver comfort and experience.
How Field-Centric Drive Works
Field-centric drive works by using the robot's current heading from the IMU (Inertial Measurement Unit) to transform joystick inputs before they are applied to the drivetrain.
The driver still uses the same controls as a standard FTC mecanum drivetrain:
- Left Joystick X → Strafing
- Left Joystick Y → Forward/Backward movement
- Right Joystick X → Rotation
The difference is that the translational inputs (X and Y) are adjusted using the robot's heading, while the rotational input remains unchanged. This allows movement to remain aligned with the field instead of the robot's orientation.
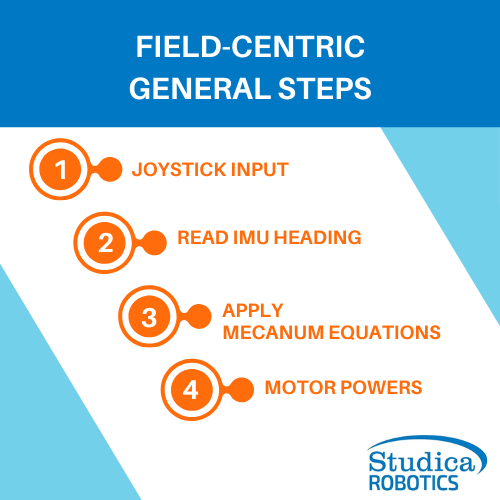 The process follows these general steps:
The process follows these general steps:
Joystick Input
↓
Read IMU Heading
↓
Apply Mecanum Equations
↓
Motor Powers
For example, if the robot turns 90 degrees, the software compensates for that change in orientation. As a result, pushing the joystick forward still moves the robot forward relative to the field, regardless of which direction the robot is facing.
Field-Centric Drive: The Math Behind the Controls
Field-centric drive works by mathematically rotating the driver's joystick input based on the robot's heading from the IMU. This allows the robot to maintain field-relative movement regardless of its orientation.
The process can be summarized in three steps:
- Read joystick input (x, y)
- Rotate the input using the robot heading (θ)
- Apply the corrected values to the mecanum drive equations
The coordinate transformation used for field-centric control is:
x′ = x cosθ + y sinθ
y′ = y cosθ − x sinθ
Where:
- x = strafe input
- y = forward/backward input
- θ = robot heading from the IMU
- x′, y′ = corrected field-relative movement commands
These equations rotate the joystick input to compensate for robot orientation while preserving the driver's intended direction of travel.
The corrected values are then used in the mecanum drive equations:
FrontLeft = y′ + x′ + rx
BackLeft = y′ − x′ + rx
FrontRight = y′ − x′ − rx
BackRight = y′ + x′ − rx
Where rx represents the driver's rotational input.
For example, if the robot is rotated 90° and the driver pushes the joystick forward, the software adjusts the input before calculating motor power. The result is that the robot continues moving forward relative to the field, even though it is facing a different direction.
Key Considerations Before Implementing a Field-Centric Drive
Field-centric drive can improve driver performance, but it also introduces additional system complexity. Before implementing it, teams should evaluate whether their robot, software, and drivers are ready for the added requirements. Here are the key questions teams should ask themselves.
Team Readiness Checklist
 Before implementing field-centric drive, confirm the following:
Before implementing field-centric drive, confirm the following:
☐ Fully working mecanum drivetrain
☐ Motor directions tested and verified (robot moves correctly in robot-centric mode)
☐ Understanding of robot axes: forward, strafe, rotation
☐ IMU properly configured in the control system
☐ IMU calibrated with stable heading output
☐ Joystick inputs correctly mapped (no X/Y inversion issues)
☐ Consistent robot-centric control before adding field-centric logic
Common Field-Centric Setup Issues
 Field-centric drive may behave incorrectly if any of the following are not configured properly:
Field-centric drive may behave incorrectly if any of the following are not configured properly:
☑️ IMU mounted in a different orientation than defined in code
☑️ Missing or inconsistent IMU calibration
☑️ Heading drift during operation
☑️ Swapped forward/back or left/right axes
☑️ Incorrect motor direction inversion
☑️ Unpredictable robot behavior when rotated
Field-Centric Drive vs Robot-Centric Drive
Both control styles are valid in FTC. The right choice depends on the team's experience, driver preferences, and software maturity.
Field-Centric Drive Pros & Cons
| Details | |
|---|---|
| Pros |
|
| Cons |
|
Robot-Centric Drive Pros & Cons
| Details | |
|---|---|
| Pros |
|
| Cons |
|
Frequently Asked Questions
Do I need an IMU for field-centric drive?
Yes. Field-centric drive relies on an IMU (Inertial Measurement Unit) to determine the robot's current heading. Without heading information, the robot cannot compensate for its orientation relative to the field.
Does field-centric drive only work with mecanum wheels?
No. Field-centric control can be used with other omnidirectional drivetrains, but it is most commonly implemented in FTC mecanum drivetrains because they can move in any direction without turning first.
Is field-centric drive better than robot-centric drive?
Not necessarily. Many teams prefer field-centric controls because they are more intuitive, but robot-centric drive is simpler to implement and can be easier to troubleshoot. The best choice depends on driver preference, team experience, and robot design.
Why does my field-centric drive behave incorrectly?
Common causes include incorrect IMU orientation settings, heading drift, swapped joystick axes, incorrect motor directions, or errors in the coordinate transformation equations.
Should rookie FTC teams use field-centric drive?
Rookie teams can certainly use field-centric drive, but it is usually best to first ensure the robot drives reliably in robot-centric mode. Once the drivetrain, motor directions, and controls are working correctly, field-centric control can be added as an upgrade.
Final Thoughts
Field-centric drive is a popular control method in FTC because it allows robot movement to remain aligned with the field rather than the robot's orientation. By using an IMU to track heading and applying a simple coordinate transformation, teams can create a more intuitive driving experience that reduces the need for constant mental reorientation during matches.
While field-centric drive introduces additional software complexity and requires a properly configured IMU, many teams find the benefits worthwhile, especially when using mecanum drivetrains. Whether your team chooses field-centric or robot-centric control ultimately comes down to driver preference, experience, and what works best for your robot and game strategy.
Related Articles
- FTC Mecanum Drive Programming Tips
- Build a Mecanum FTC Chassis in Your Team Colors
- Create a Fast & Versatile Mecanum Chassis for Your FTC Robot
- How to Build a Mecanum Drivetrain – Instructions
- Choosing the Right Drivetrain for Your Robot