










































Robot Wheels: A Guide for Mobile Robotics
Motion components play a large role in robotics, but with so many choices it can often be confusing. In this article, we will explore a variety of robot wheels. This helpful guide focuses on mobile robotics and creating robots for robotics competitions. It is designed to help you select the best wheels for your robot. Let's dig deeper into the composition of the different types of wheels and explain the use cases for each.
Overview of Robot Wheels
What wheels should you use for your robot? Choosing the correct wheels for your robot is a critical decision for your robot that will directly impact its mobility, performance, and stability. Below we will explore common types of wheels for mobile robotics competitions including mecanum wheels, omni wheels, standard wheels, all-terrain robot wheels, and compliant wheels.
Mecanum Wheels

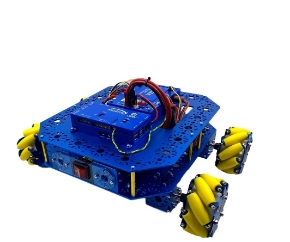
Mecanum wheels provide traction and stability for omnidirectional movement. Movements you can achieve include standard forward and backward motion, rotating around a fixed axis, and strafing from side to side or at an angle. An example is the 100mm slim mecanum wheel from Studica Robotics. As you can see, the wheel is comprised of 12 rollers that are orientated 45° to the axis of rotation of the wheel. These wheels are powered individually. The angle of the rollers allows your robot to perform a wide range of movements. Steel ball bearings make the roll more fluent. A benefit to this 100mm slim wheel is that it allows for the design of a wider base robot.
Omni Wheels

Similar to the Mecanum wheel, Omni wheels are useful for creating omnidirectional movement. These wheels have rollers around their circumference. However, in this case, the wheels are perpendicular to the wheel plane. These wheels will move forward and backward and strafe from side to side. They provide flexibility when designing your drive base. For example, you can build a 4-wheel drive, 3-wheel drive, or just have two wheels powered on a 4-wheel drive. Omni wheels are excellent for use in applications that require high maneuverability. Shown here is a 100mm (4 inches) double plastic omni wheel that is ideal for fast turning, and offers easy direction control and tracking.
Should you use Mecanum or Omni Wheels?
How do you know if you need Omni or Mecanum wheels? These questions can help you decide.
- How many wheels do you want to have in your wheelbase? If the answer is a 3-wheel drive base you are going to need to use Omni wheels. Due to the fact that Mecanum wheels must have an individual motor for each wheel.
- How many motors do I want to use for my robot? Again, with Mecanum wheels each wheel must have its own motor. However, with Omni wheels,
Standard Wheels

Standard wheels, also referred to as drive wheels, are designed to perform on smooth, flat surfaces. They are commonly used for indoor mobile robots and are generally made out of materials such as soft plastic or rubber. As an example, here we have a 100mm drive wheel (4") 50A, 25mm wide, 1/2" inner hex in blue. The inner material is molded plastic and the exterior material is TPU polyurethane. At Studica Robotics, you can find standard drive wheels available in a variety of sizes and durometers. Options include 100mm 50A - 12.5mm wide, 100mm 50A - 25mm wide, 50mm 35A -25mm wide, 50mm 40A-25mm, 50mm 50A - 25mm wide, 50mm - 60A -25 mm wide, and 75mm 60A -12.5mm drive wheels.
Compliant Wheels for Robots
Compliant wheels also known as flex wheels are not intended for moving your robot, they are designed for moving objects. You can also modify Studica Robotics flex wheels for better intake. This comes in handy when there are multiple-sized objects to intake for your robot. To do this, you can simply remove the top edges of the wheel by cutting them allowing the wheel to be star-shaped. Once the wheel has been cut, it can flex even more. Compliant wheels are available at Studica Robotics in 35A, 40A, 50A, and 60A durometers. 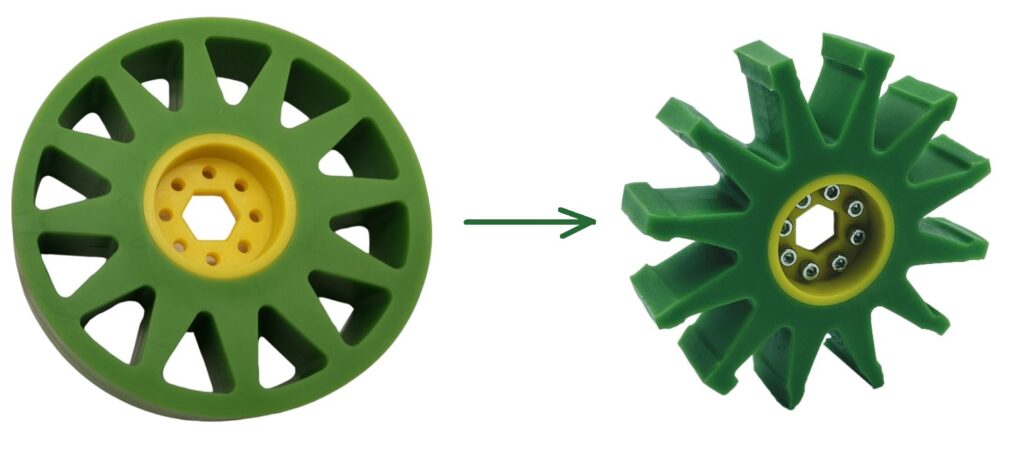
All-terrain Robot Wheels
Treaded wheels also referred to as all-terrain robot wheels are paired with shock absorbers and are ideal for traversing rough, uneven terrains. They should be used for applications that require high traction. The example below is the All-Terrain Wheel Set from Studica Robotics. It includes two left and two right rubber wheels that have foam cores and therefore do not require air. They've been tested up to 40 kg (88 lbs) using all four wheels. They offer excellent traction on smooth, solid surfaces and are particularly well-suited for navigating uneven terrains, including areas with mulch, sand, dirt, or gravel.
