










































How is Odometry Used in FTC Robotics Competitions?
In the deep-diving world of FTC robotics, precision is everything. One of the key techniques that can give your team the edge is odometry—a method that uses data from motion sensors to track your robot’s position with pinpoint accuracy. This method is beneficial for autonomous mobile robots in circumstances where executing complex tasks requires the robot's precise positioning. Implementing odometry in robotics competitions, such as the FIRST® Tech Challenge (FTC), significantly enhances the performance and reliability of your robot during autonomous operations. Odometry will help your robot navigate when it travels INTO THE DEEPSM this season!
Navigating FTC with Odometry
Odometry helps robots navigate the FTC game field, particularly during the autonomous period, by estimating their position relative to their starting point. This positioning makes it easier to execute tasks on the game field. There are several methods for using odometry in FTC, each has pros and cons. Let's explore the two most common methods:
 Drive Encoder Localization
Drive Encoder Localization
The Drive Encoder Localization method is a straightforward approach. By attaching encoders to the robot's drive motors, teams can estimate their robot's position by monitoring the rotation of motor shafts.
Advantages:
- Cost-effective.
- Easy to set up.
- No extra hardware required.
Considerations:
- Not fully reliable.
- Factors like wheel slippage, especially with Mecanum wheels, can lead to inaccuracies due to drifting or inconsistent traction.
Odometry Pods/Dead Wheels
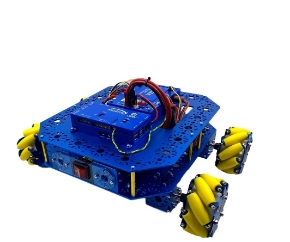
 Mecanum drivebases, popular in FTC, often struggle with traction on the game field particularly at high speeds. This can cause robots to drift, leading to inaccuracies in positioning. Even minor collisions or bumps during a match can increase these errors, which can accumulate and negatively affect performance. Odometry Pods utilize small, unpowered wheels connected to external encoders, reducing the risk of slippage inaccuracies, and providing more reliable tracking.
Mecanum drivebases, popular in FTC, often struggle with traction on the game field particularly at high speeds. This can cause robots to drift, leading to inaccuracies in positioning. Even minor collisions or bumps during a match can increase these errors, which can accumulate and negatively affect performance. Odometry Pods utilize small, unpowered wheels connected to external encoders, reducing the risk of slippage inaccuracies, and providing more reliable tracking.
Odometry pods with dead wheels can better track a robot's movement because they are designed to maintain constant contact with the ground, ensuring more accurate positioning throughout the match. Typically, 2-3 small omni wheels are used. In a two-wheel system, one wheel tracks movement in the x-direction and the other in the y-direction. A three-wheel system has two wheels parallel to each other and one perpendicular. While two-wheel systems are cheaper, they tend to drift more than three-wheel systems.
Advantages:
- More precise.
- Greater accuracy over short distances.
Considerations:
- Additional costs involved.
- Requires extra components.
- It is more complex to design.
- The wheels must stay in constant contact with the ground for accurate tracking.
Odometry Pod Assembly
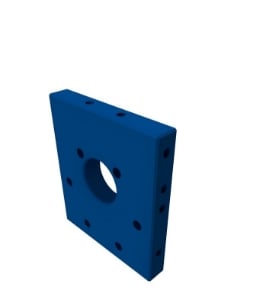
Dillan from Rust Belt Robotics generously shared his design for an odometry pod he created integrating the Cypher MAX Encoder and the 38mm Omni Wheel into a single, compact casing. The wheel shaft passes through the Cypher MAX, which counts the rotations to determine the distance traveled from the robot’s starting position. The pod is designed to fit seamlessly into a robot's drivebase without occupying excessive space, ensuring the omni wheel remains in constant contact with the field surface for accurate data collection. 
Odometry Solutions from Studica Robotics
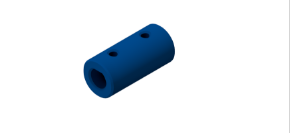
 To implement precise odometry, Studica Robotics offers cutting-edge odometry tools like the Cypher MAX Through Bore Encoder, which delivers accuracy for your FTC robot. This powerful sensor combines absolute and incremental encoder technologies into one convenient solution. With 2048 counts per revolution, it provides precise relative and absolute position data. The Cypher MAX operates smoothly at either 3.3V or 5V, making it adaptable to various power setups. You can easily convert a 3/8-inch Hex to a 6mm D-Shaft bore, 5mm Hex, or 7 mm Hex, providing you with flexibility for your application needs. It is a versatile advanced sensor for enhanced localization and control.
To implement precise odometry, Studica Robotics offers cutting-edge odometry tools like the Cypher MAX Through Bore Encoder, which delivers accuracy for your FTC robot. This powerful sensor combines absolute and incremental encoder technologies into one convenient solution. With 2048 counts per revolution, it provides precise relative and absolute position data. The Cypher MAX operates smoothly at either 3.3V or 5V, making it adaptable to various power setups. You can easily convert a 3/8-inch Hex to a 6mm D-Shaft bore, 5mm Hex, or 7 mm Hex, providing you with flexibility for your application needs. It is a versatile advanced sensor for enhanced localization and control. 
Designed for odometry systems and to complement the Cypher MAX, Studica Robotics offers the 38mm Omni Wheel. This small, yet powerful wheel, when paired with the Cypher MAX, creates a robust solution for tracking and control during autonomous periods. This Omni wheel fits the need for a small and compact dead wheel for tracking. Combined with the Cypher MAX, the 38mm Omni-wheel creates a robust odometry solution for tracking and control during autonomous periods.
Odometry enables robots to accurately track their position while diving INTO THE DEEP, or navigating the game field, during autonomous periods. Methods like Drive Encoder Localization and Odometry Pods, allow teams to enhance their robots’ navigation and task execution. Each approach has advantages and considerations, but the goal remains improving a robot's ability to understand and respond to its environment. Consider both options when designing your robot to determine the solution that best meets your needs. Odometry tools, such as those offered by Studica Robotics, make it easier for FTC teams to achieve the best performance possible for their autonomous strategies. At Studica Robotics, we're here to provide the advanced tools you need to build accurate and reliable odometry systems.