








































Quick Summary: International competitors gathered in Jamaica for a five-day robotics training camp designed to prepare them for WorldSkills Shanghai 2026. In partnership with Studica Robotics, the program focused on Autonomous Mobile Robotics (AMR) and Unmanned Aerial Systems (UAS), combining hands-on robot and drone training with real-world competition preparation. Participants progressed from system setup and assembly to programming, testing, and evaluation. The goal was to build both technical and teamwork skills needed for global competition success.
Robotics Training for WorldSkills Competition
As global demand for automation and intelligent systems continues to grow, WorldSkills Shanghai 2026 is placing a strong emphasis on advanced robotics training in Autonomous Mobile Robotics (AMR) and Unmanned Aerial Systems (UAS), where competitors must apply engineering principles in real time under international competition standards.
 This type of robotics training goes beyond technical instruction; it mirrors the environments shaping modern industry, from smart manufacturing and autonomous logistics to precision agriculture, infrastructure inspection, and emergency response systems. Participants gain hands-on experience with technologies that are actively transforming how work is designed and delivered worldwide.
This type of robotics training goes beyond technical instruction; it mirrors the environments shaping modern industry, from smart manufacturing and autonomous logistics to precision agriculture, infrastructure inspection, and emergency response systems. Participants gain hands-on experience with technologies that are actively transforming how work is designed and delivered worldwide.
By working through real-world challenges in both AMR and UAS, competitors strengthen not only their technical capabilities but also their problem-solving, adaptability, and collaboration skills essential for success at WorldSkills Shanghai 2026 and beyond.
 |
 |
 |
 |
Inside the Robotics Training Experience
The five-day training camp followed a progressive learning model that moved competitors from foundational system setup to competition-level performance in both Autonomous Mobile Robotics (AMR) and Unmanned Aerial Systems (UAS). Each phase built upon the previous one, combining technical instruction, hands-on application, and performance evaluation.
| Training Phase | Activities & Outcomes |
|---|---|
| Phase 1: Foundation and Team Building | Competitors were introduced to the competition environment, assembled workstations, reviewed system components, and built connections with participants and experts from around the world. |
| Phase 2: Technical Immersion | Participants explored ROS2, tele-operation, SLAM, grid-based mapping, autonomous navigation, and drone control systems while integrating hardware and software components. |
| Phase 3: Competition Simulation | Teams applied their knowledge through autonomous navigation challenges, flight exercises, troubleshooting activities, and real-time decision-making under competition conditions. |
| Phase 4: Performance Optimization | Competitors refined system performance, debugged technical issues, optimized navigation and control strategies, and received coaching from international experts. |
| Phase 5: Evaluation and Showcase | The program concluded with system demonstrations, drone mission execution, performance assessments, and evaluations of teamwork, communication, and technical readiness. |
By the end of the program, participants had progressed from assembling and configuring systems to executing autonomous navigation tasks, flying drones under performance constraints, and demonstrating the teamwork and technical proficiency required for WorldSkills competition.
 |
 |
 |
 |
Voices from the Camp
 "Through international collaboration, knowledge sharing, and hands-on learning, participants are gaining valuable exposure to industry-leading practices in autonomous mobile robotics." -Walace Felipe de Almeida Oliveira, WorldSkills Brazil
"Through international collaboration, knowledge sharing, and hands-on learning, participants are gaining valuable exposure to industry-leading practices in autonomous mobile robotics." -Walace Felipe de Almeida Oliveira, WorldSkills Brazil
“Robotics is not an activity that only men can partake in. Women can, as well, and we’re living proof of this…”
- St. Hilda’s Diocesan High School Team Captain, Toria-Lee Martin
“If you want to beat the best, you have to see how the best train.”
- Derek Murphy, General Manager, Studica Robotics
Why Train AMR?
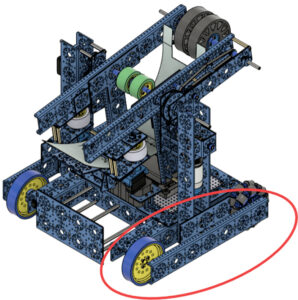
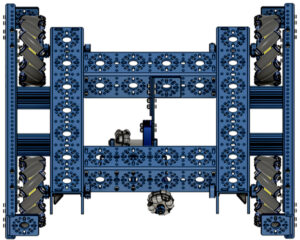
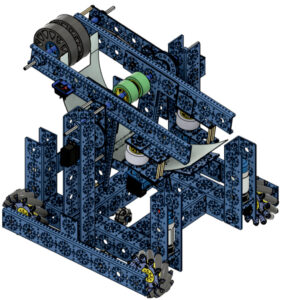
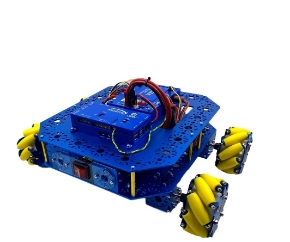
 Autonomous Mobile Robotics (AMR) is one of the fastest-growing areas in technical education and modern industry. It focuses on designing and building robots that can move and operate independently using sensors, control systems, and intelligent programming. Through AMR training, participants develop a wide range of integrated engineering skills, including mechanical and electronic system design, sensor integration, and automation. They also strengthen their ability to program autonomous systems, enabling robots to navigate, map environments, and respond to real-world conditions. AMR training also develops problem-solving and teamwork skills, reflecting the collaborative nature of real-world engineering environments.
Autonomous Mobile Robotics (AMR) is one of the fastest-growing areas in technical education and modern industry. It focuses on designing and building robots that can move and operate independently using sensors, control systems, and intelligent programming. Through AMR training, participants develop a wide range of integrated engineering skills, including mechanical and electronic system design, sensor integration, and automation. They also strengthen their ability to program autonomous systems, enabling robots to navigate, map environments, and respond to real-world conditions. AMR training also develops problem-solving and teamwork skills, reflecting the collaborative nature of real-world engineering environments.
Why is UAS Important?
 Unmanned Aerial Systems (UAS) are rapidly expanding across industries and are becoming essential in areas such as infrastructure inspection, agriculture, logistics, disaster response, and environmental monitoring.
Unmanned Aerial Systems (UAS) are rapidly expanding across industries and are becoming essential in areas such as infrastructure inspection, agriculture, logistics, disaster response, and environmental monitoring.
Training in UAS helps participants understand both the mechanical and digital systems behind drone technology. This includes building and configuring aerial systems, programming flight behavior, and developing the ability to troubleshoot and diagnose technical issues. As with AMR, this training strengthens critical thinking, engineering methodologies, and technical collaboration. These skills are increasingly in demand across aerospace, advanced manufacturing, infrastructure inspection, and emerging drone technology sectors.
Studica Robotics and Global Skills Development
With over 40 years of experience supporting technical education, Studica Robotics provides standardized training kits, curriculum resources, and technical support for WorldSkills member countries. For AMR competitions, teams use the official WorldSkills Autonomous Mobile Robotics Collection. For UAS training, participants utilize the WS500 Quadcopter Kit to build, program, and operate drone systems while also developing troubleshooting and diagnostic skills.
This structured ecosystem helps ensure consistent training quality while encouraging collaboration and peer learning across countries. Through its partnership with WorldSkills, Studica Robotics helps member countries develop robotics and UAS skills by providing standardized equipment, training resources, and competition support.
What This Robotics Training Experience Delivers
 Beyond technical preparation, the training camp is designed to build long-term capabilities that extend well beyond the competition itself. It strengthens real-world engineering and robotics skills by providing competitors with hands-on experience with systems they will encounter in advanced technical environments. At the same time, it improves collaboration within international teams, where participants must communicate, adapt, and work effectively across different cultures and approaches.
Beyond technical preparation, the training camp is designed to build long-term capabilities that extend well beyond the competition itself. It strengthens real-world engineering and robotics skills by providing competitors with hands-on experience with systems they will encounter in advanced technical environments. At the same time, it improves collaboration within international teams, where participants must communicate, adapt, and work effectively across different cultures and approaches.
The experience also helps develop the ability to solve complex problems under the pressures of a competition environment, where timing, accuracy, and decision-making all matter. Most importantly, it supports clear pathways into future technical careers by exposing participants to industry-relevant tools, processes, and expectations.
This training camp provided competitors with an opportunity to develop their skills in a collaborative international environment while preparing for the upcoming challenges of WorldSkills Shanghai 2026.
Frequently Asked Questions
What is Autonomous Mobile Robotics (AMR)?
AMR involves designing, building, and programming robots that operate independently using sensors, control systems, and automation logic.
What are Unmanned Aerial Systems (UAS)?
Unmanned Aerial Systems (UAS) focus on drone technology, including assembly, programming, flight control, maintenance, and system diagnostics.
Who is this WorldSkills Jamaica robotics training for?
It is designed for students and competitors preparing for international robotics competitions and technical skills development programs.
How does Studica Robotics support WorldSkills?
Studica Robotics provides standardized kits, training materials, and technical expertise to support global robotics education and competition readiness.
What is the goal of the WorldSkills Jamaica robotics training camp?
To prepare competitors for WorldSkills Shanghai 2026 through hands-on robotics and drone training under real competition conditions.
Conclusion
The WorldSkills Jamaica & Studica Robotics Invitational Training Camp demonstrated how immersive, hands-on learning can accelerate technical skill development and global competition readiness.
Over five days, competitors moved from foundational system understanding to full competition performance in Autonomous Mobile Robotics and Unmanned Aerial Systems. Beyond robotics, the camp strengthened collaboration, communication, and confidence. These skills are essential for success in both international competition and future technical careers.
As robotics, automation, and drone technologies continue reshaping global industries, programs like this are not just training events; they are launchpads for the next generation of skilled robotics professionals.